This filter performs a pixelwise combination of an arbitrary number of input images, where each of them represents a segmentation of the same scene (i.e., image).
More...
|
| Image | Execute (const std::vector< Image > &images) |
| |
| Image | Execute (const Image &image1) |
| |
| Image | Execute (const Image &image1, const Image &image2) |
| |
| Image | Execute (const Image &image1, const Image &image2, const Image &image3) |
| |
| Image | Execute (const Image &image1, const Image &image2, const Image &image3, const Image &image4) |
| |
| Image | Execute (const Image &image1, const Image &image2, const Image &image3, const Image &image4, const Image &image5) |
| |
| Image | Execute (const std::vector< Image > &images, uint64_t labelForUndecidedPixels, float terminationUpdateThreshold, unsigned int maximumNumberOfIterations, std::vector< float > priorProbabilities) |
| |
| Image | Execute (const Image &image1, uint64_t labelForUndecidedPixels, float terminationUpdateThreshold, unsigned int maximumNumberOfIterations, std::vector< float > priorProbabilities) |
| |
| Image | Execute (const Image &image1, const Image &image2, uint64_t labelForUndecidedPixels, float terminationUpdateThreshold, unsigned int maximumNumberOfIterations, std::vector< float > priorProbabilities) |
| |
| Image | Execute (const Image &image1, const Image &image2, const Image &image3, uint64_t labelForUndecidedPixels, float terminationUpdateThreshold, unsigned int maximumNumberOfIterations, std::vector< float > priorProbabilities) |
| |
| Image | Execute (const Image &image1, const Image &image2, const Image &image3, const Image &image4, uint64_t labelForUndecidedPixels, float terminationUpdateThreshold, unsigned int maximumNumberOfIterations, std::vector< float > priorProbabilities) |
| |
| Image | Execute (const Image &image1, const Image &image2, const Image &image3, const Image &image4, const Image &image5, uint64_t labelForUndecidedPixels, float terminationUpdateThreshold, unsigned int maximumNumberOfIterations, std::vector< float > priorProbabilities) |
| |
| std::vector< float > | GetConfusionMatrix (unsigned int input) const |
| |
| uint64_t | GetLabelForUndecidedPixels () const |
| |
| unsigned int | GetMaximumNumberOfIterations () const |
| |
| std::string | GetName () const |
| |
| std::vector< float > | GetPriorProbabilities () const |
| |
| float | GetTerminationUpdateThreshold () const |
| |
| | MultiLabelSTAPLEImageFilter () |
| |
| Self & | SetLabelForUndecidedPixels (uint64_t LabelForUndecidedPixels) |
| |
| Self & | SetMaximumNumberOfIterations (unsigned int MaximumNumberOfIterations) |
| |
| Self & | SetPriorProbabilities (std::vector< float > PriorProbabilities) |
| |
| Self & | SetTerminationUpdateThreshold (float TerminationUpdateThreshold) |
| |
| std::string | ToString () const |
| |
| | ~MultiLabelSTAPLEImageFilter () |
| |
| | ImageFilter () |
| |
| virtual | ~ImageFilter ()=0 |
| |
| virtual void | Abort () |
| |
| virtual int | AddCommand (itk::simple::EventEnum event, itk::simple::Command &cmd) |
| | Add a Command Object to observer the event. More...
|
| |
| virtual float | GetProgress () const |
| | An Active Measurement of the progress of execution. More...
|
| |
| virtual bool | HasCommand (itk::simple::EventEnum event) const |
| | Query of this object has any registered commands for event. More...
|
| |
| | ProcessObject () |
| |
| virtual void | RemoveAllCommands () |
| | Remove all registered commands. More...
|
| |
| virtual | ~ProcessObject () |
| |
| virtual void | DebugOn () |
| |
| virtual void | DebugOff () |
| |
| virtual bool | GetDebug () const |
| |
| virtual void | SetDebug (bool debugFlag) |
| |
| virtual void | SetNumberOfThreads (unsigned int n) |
| |
| virtual unsigned int | GetNumberOfThreads () const |
| |
|
| static bool | GetGlobalDefaultDebug () |
| |
| static void | GlobalDefaultDebugOff () |
| |
| static void | GlobalDefaultDebugOn () |
| |
| static void | SetGlobalDefaultDebug (bool debugFlag) |
| |
| static void | GlobalWarningDisplayOn () |
| |
| static void | GlobalWarningDisplayOff () |
| |
| static void | SetGlobalWarningDisplay (bool flag) |
| |
| static bool | GetGlobalWarningDisplay () |
| |
| static void | SetGlobalDefaultNumberOfThreads (unsigned int n) |
| |
| static unsigned int | GetGlobalDefaultNumberOfThreads () |
| |
| static double | GetGlobalDefaultCoordinateTolerance () |
| | Access the global tolerance to determine congruent spaces. More...
|
| |
| static void | SetGlobalDefaultCoordinateTolerance (double) |
| | Access the global tolerance to determine congruent spaces. More...
|
| |
| static double | GetGlobalDefaultDirectionTolerance () |
| | Access the global tolerance to determine congruent spaces. More...
|
| |
| static void | SetGlobalDefaultDirectionTolerance (double) |
| | Access the global tolerance to determine congruent spaces. More...
|
| |
| virtual unsigned long | AddITKObserver (const itk::EventObject &, itk::Command *) |
| |
| virtual itk::ProcessObject * | GetActiveProcess () |
| |
| virtual void | OnActiveProcessDelete () |
| |
| virtual void | onCommandDelete (const itk::simple::Command *cmd) throw () |
| |
| virtual void | PreUpdate (itk::ProcessObject *p) |
| |
| virtual void | RemoveITKObserver (EventCommand &e) |
| |
| | NonCopyable () |
| |
| static void | FixNonZeroIndex (TImageType *img) |
| |
| template<class TImageType > |
| static TImageType::ConstPointer | CastImageToITK (const Image &img) |
| |
| template<class TImageType > |
| static Image | CastITKToImage (TImageType *img) |
| |
| template<class TPixelType , unsigned int VImageDimension, unsigned int VLength, template< typename, unsigned int > class TVector> |
| static Image | CastITKToImage (itk::Image< TVector< TPixelType, VLength >, VImageDimension > *img) |
| |
| static const itk::EventObject & | GetITKEventObject (EventEnum e) |
| |
| template<typename T > |
| static std::ostream & | ToStringHelper (std::ostream &os, const T &v) |
| |
| static std::ostream & | ToStringHelper (std::ostream &os, const char &v) |
| |
| static std::ostream & | ToStringHelper (std::ostream &os, const signed char &v) |
| |
| static std::ostream & | ToStringHelper (std::ostream &os, const unsigned char &v) |
| |
This filter performs a pixelwise combination of an arbitrary number of input images, where each of them represents a segmentation of the same scene (i.e., image).
The labelings in the images are weighted relative to each other based on their "performance" as estimated by an expectation-maximization algorithm. In the process, a ground truth segmentation is estimated, and the estimated performances of the individual segmentations are relative to this estimated ground truth.
The algorithm is based on the binary STAPLE algorithm by Warfield et al. as published originally in
S. Warfield, K. Zou, W. Wells, "Validation of image segmentation and expert
quality with an expectation-maximization algorithm" in MICCAI 2002: Fifth International Conference on Medical Image Computing and Computer-Assisted Intervention, Springer-Verlag, Heidelberg, Germany, 2002, pp. 298-306
The multi-label algorithm implemented here is described in detail in
T. Rohlfing, D. B. Russakoff, and C. R. Maurer, Jr., "Performance-based classifier combination in atlas-based image segmentation using expectation-maximization parameter estimation," IEEE Transactions on Medical Imaging, vol. 23, pp. 983-994, Aug. 2004.
- INPUTS
- All input volumes to this filter must be segmentations of an image, that is, they must have discrete pixel values where each value represents a different segmented object.
Input volumes must all contain the same size RequestedRegions. Not all input images must contain all possible labels, but all label values must have the same meaning in all images.
The filter can optionally be provided with estimates for the a priori class probabilities through the SetPriorProbabilities function. If no estimate is provided, one is automatically generated by analyzing the relative frequencies of the labels in the input images.
- OUTPUTS
- The filter produces a single output volume. Each output pixel contains the label that has the highest probability of being the correct label, based on the performance models of the individual segmentations. If the maximum probaility is not unique, i.e., if more than one label have a maximum probability, then an "undecided" label is assigned to that output pixel.
By default, the label used for undecided pixels is the maximum label value used in the input images plus one. Since it is possible for an image with 8 bit pixel values to use all 256 possible label values, it is permissible to combine 8 bit (i.e., byte) images into a 16 bit (i.e., short) output image.
In addition to the combined image, the estimated confusion matrices for each of the input segmentations can be obtained through the GetConfusionMatrix member function.
- PARAMETERS
- The label used for "undecided" labels can be set using SetLabelForUndecidedPixels. This functionality can be unset by calling UnsetLabelForUndecidedPixels.
A termination threshold for the EM iteration can be defined by calling SetTerminationUpdateThreshold. The iteration terminates once no single parameter of any confusion matrix changes by less than this threshold. Alternatively, a maximum number of iterations can be specified by calling SetMaximumNumberOfIterations. The algorithm may still terminate after a smaller number of iterations if the termination threshold criterion is satisfied.
- EVENTS
- This filter invokes IterationEvent() at each iteration of the E-M algorithm. Setting the AbortGenerateData() flag will cause the algorithm to halt after the current iteration and produce results just as if it had converged. The algorithm makes no attempt to report its progress since the number of iterations needed cannot be known in advance.
- Author
- Torsten Rohlfing, SRI International, Neuroscience Program
- See also
- itk::simple::MultiLabelSTAPLE for the procedural interface
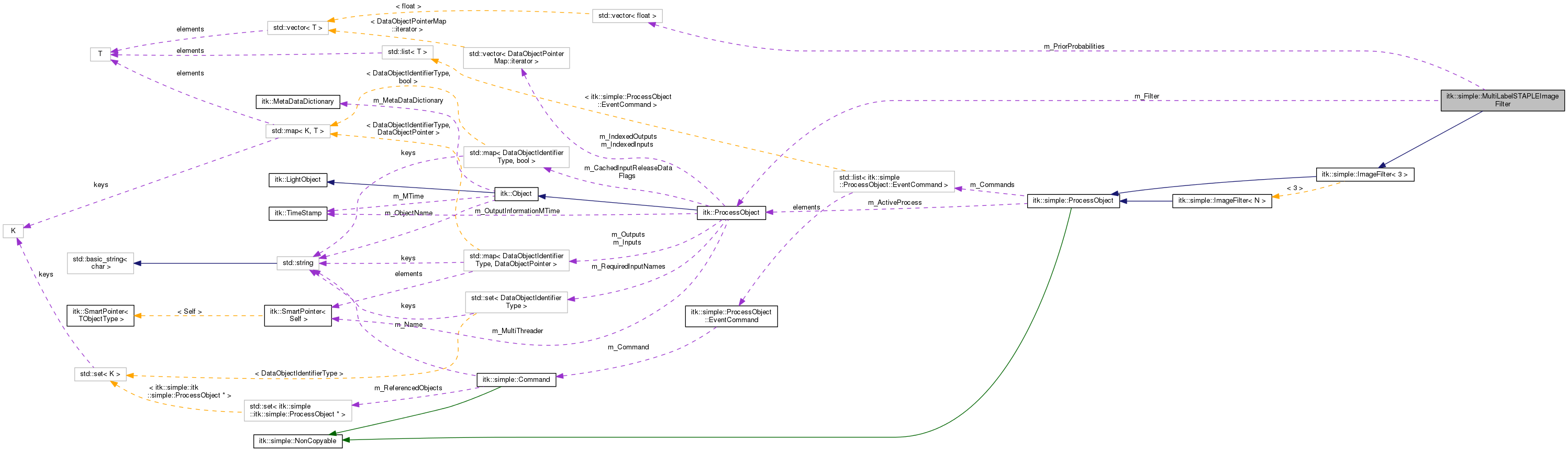
Definition at line 76 of file sitkMultiLabelSTAPLEImageFilter.h.
 Inheritance diagram for itk::simple::MultiLabelSTAPLEImageFilter:
Inheritance diagram for itk::simple::MultiLabelSTAPLEImageFilter: