Computes a scalar image from a vector image (e.g., deformation field) input, where each output scalar at each pixel is the Jacobian determinant of the vector field at that location. This calculation is correct in the case where the vector image is a "displacement" from the current location. The computation for the jacobian determinant is: det[ dT/dx ] = det[ I + du/dx ].
More...
|
| static bool | GetGlobalDefaultDebug () |
| |
| static void | GlobalDefaultDebugOff () |
| |
| static void | GlobalDefaultDebugOn () |
| |
| static void | SetGlobalDefaultDebug (bool debugFlag) |
| |
| static void | GlobalWarningDisplayOn () |
| |
| static void | GlobalWarningDisplayOff () |
| |
| static void | SetGlobalWarningDisplay (bool flag) |
| |
| static bool | GetGlobalWarningDisplay () |
| |
| static void | SetGlobalDefaultNumberOfThreads (unsigned int n) |
| |
| static unsigned int | GetGlobalDefaultNumberOfThreads () |
| |
| static double | GetGlobalDefaultCoordinateTolerance () |
| | Access the global tolerance to determine congruent spaces. More...
|
| |
| static void | SetGlobalDefaultCoordinateTolerance (double) |
| | Access the global tolerance to determine congruent spaces. More...
|
| |
| static double | GetGlobalDefaultDirectionTolerance () |
| | Access the global tolerance to determine congruent spaces. More...
|
| |
| static void | SetGlobalDefaultDirectionTolerance (double) |
| | Access the global tolerance to determine congruent spaces. More...
|
| |
| virtual unsigned long | AddITKObserver (const itk::EventObject &, itk::Command *) |
| |
| virtual itk::ProcessObject * | GetActiveProcess () |
| |
| virtual void | OnActiveProcessDelete () |
| |
| virtual void | onCommandDelete (const itk::simple::Command *cmd) SITK_NOEXCEPT |
| |
| virtual void | PreUpdate (itk::ProcessObject *p) |
| |
| virtual void | RemoveITKObserver (EventCommand &e) |
| |
| | NonCopyable () |
| |
| static void | FixNonZeroIndex (TImageType *img) |
| |
| template<class TImageType > |
| static TImageType::ConstPointer | CastImageToITK (const Image &img) |
| |
| template<class TImageType > |
| static Image | CastITKToImage (TImageType *img) |
| |
| template<class TPixelType , unsigned int VImageDimension, unsigned int VLength, template< typename, unsigned int > class TVector> |
| static Image | CastITKToImage (itk::Image< TVector< TPixelType, VLength >, VImageDimension > *img) |
| |
| static const itk::EventObject & | GetITKEventObject (EventEnum e) |
| |
| template<typename T > |
| static std::ostream & | ToStringHelper (std::ostream &os, const T &v) |
| |
| static std::ostream & | ToStringHelper (std::ostream &os, const char &v) |
| |
| static std::ostream & | ToStringHelper (std::ostream &os, const signed char &v) |
| |
| static std::ostream & | ToStringHelper (std::ostream &os, const unsigned char &v) |
| |
Computes a scalar image from a vector image (e.g., deformation field) input, where each output scalar at each pixel is the Jacobian determinant of the vector field at that location. This calculation is correct in the case where the vector image is a "displacement" from the current location. The computation for the jacobian determinant is: det[ dT/dx ] = det[ I + du/dx ].
- Overview
- This filter is based on itkVectorGradientMagnitudeImageFilter and supports the m_DerivativeWeights weights for partial derivatives.
Note that the determinant of a zero vector field is also zero, whereas the Jacobian determinant of the corresponding identity warp transformation is 1.0. In order to compute the effective deformation Jacobian determinant 1.0 must be added to the diagonal elements of Jacobian prior to taking the derivative. i.e. det([ (1.0+dx/dx) dx/dy dx/dz ; dy/dx (1.0+dy/dy) dy/dz; dz/dx dz/dy (1.0+dz/dz) ])
- Template Parameters (Input and Output)
- This filter has one required template parameter which defines the input image type. The pixel type of the input image is assumed to be a vector (e.g., itk::Vector , itk::RGBPixel , itk::FixedArray ). The scalar type of the vector components must be castable to floating point. Instantiating with an image of RGBPixel<unsigned short>, for example, is allowed, but the filter will convert it to an image of Vector<float,3> for processing.
The second template parameter, TRealType, can be optionally specified to define the scalar numerical type used in calculations. This is the component type of the output image, which will be of itk::Vector<TRealType, N>, where N is the number of channels in the multiple component input image. The default type of TRealType is float. For extra precision, you may safely change this parameter to double.
The third template parameter is the output image type. The third parameter will be automatically constructed from the first and second parameters, so it is not necessary (or advisable) to set this parameter explicitly. Given an M-channel input image with dimensionality N, and a numerical type specified as TRealType, the output image will be of type itk::Image<TRealType, N>.
- Filter Parameters
- The method SetUseImageSpacingOn will cause derivatives in the image to be scaled (inversely) with the pixel size of the input image, effectively taking derivatives in world coordinates (versus isotropic image space). SetUseImageSpacingOff turns this functionality off. Default is UseImageSpacingOn. The parameter UseImageSpacing can be set directly with the method SetUseImageSpacing(bool) .
Weights can be applied to the derivatives directly using the SetDerivativeWeights method. Note that if UseImageSpacing is set to TRUE (ON), then these weights will be overridden by weights derived from the image spacing when the filter is updated. The argument to this method is a C array of TRealValue type.
- Constraints
- We use vnl_det for determinent computation, which only supports square matrices. So the vector dimension of the input image values must be equal to the image dimensions, which is trivially true for a deformation field that maps an n-dimensional space onto itself.
Currently, dimensions up to and including 4 are supported. This limitation comes from the presence of vnl_det() functions for matrices of dimension up to 4x4.
The template parameter TRealType must be floating point (float or double) or a user-defined "real" numerical type with arithmetic operations defined sufficient to compute derivatives.
- See also
- Image
-
Neighborhood
-
NeighborhoodOperator
-
NeighborhoodIterator
- Note
- This class was adapted by
- Author
- Hans J. Johnson, The University of Iowa from code provided by
-
Tom Vercauteren, INRIA & Mauna Kea Technologies
-
Torsten Rohlfing, Neuroscience Program, SRI International.
- See also
- itk::simple::DisplacementFieldJacobianDeterminantFilter for the procedural interface
-
itk::DisplacementFieldJacobianDeterminantFilter for the Doxygen on the original ITK class.
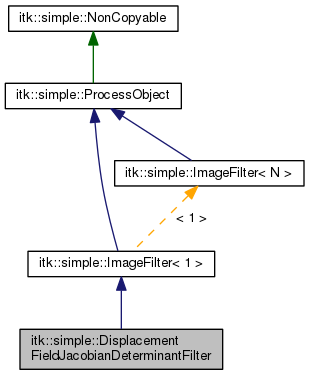
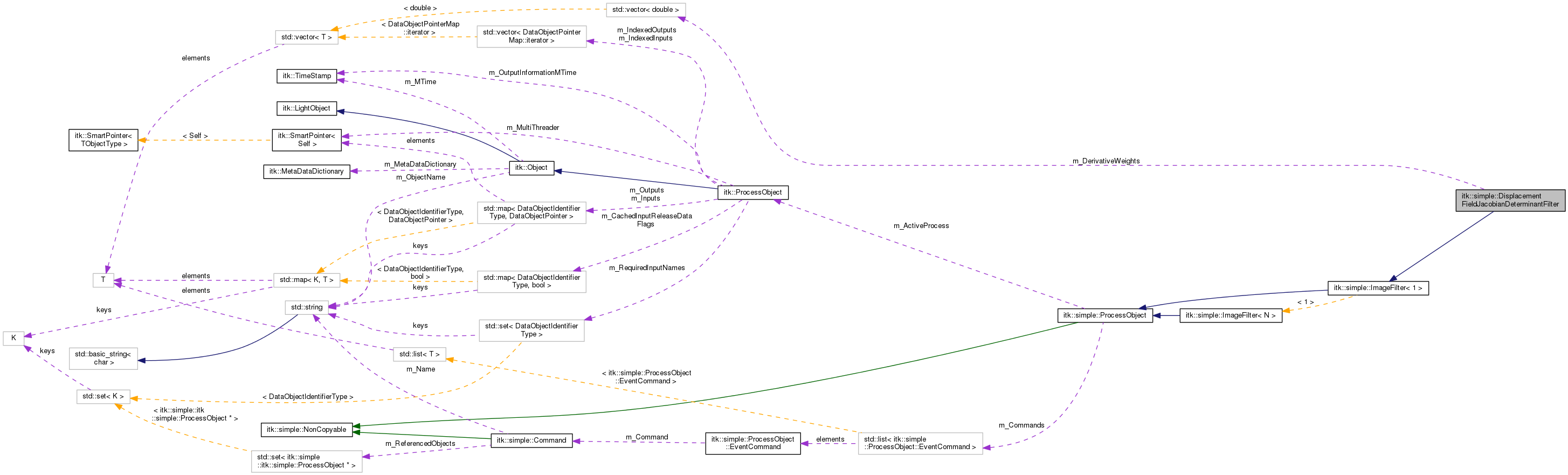
Definition at line 80 of file sitkDisplacementFieldJacobianDeterminantFilter.h.
 Inheritance diagram for itk::simple::DisplacementFieldJacobianDeterminantFilter:
Inheritance diagram for itk::simple::DisplacementFieldJacobianDeterminantFilter: